
AIRSUB — AUV Guide and Positioning for submarine cable inspection
Visual Inspection of underwater installations such as power cables, oil and gas pipes, sewers,etc. by means of an autonomous Undewater Vehicle.
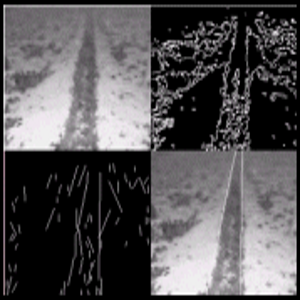
Nowadays, the surveillance and inspection of underwater installations, such as power and telecommunication cables and pipelines, is carried out by trained operators who, from the surface, control a Remotely Operated Vehicle (ROV) with cameras mounted over it. This is a tedious, time-consuming and expensive task, prone to errors mainly because of loss of attention or fatigue of the operator and also due to the typical low quality of seabed images. In this work, the development of a vision system guiding an Autonomous Underwater Vehicle (AUV) able to detect and track automatically an underwater power cable laid on the seabed has been the main concern.
Project Leader

Project Collaborators



Related Publications
-
A Novel Image Feature Classifier based on Inverse Perspective Transformation
-
Visual Navigation for Mobile Robots: a Survey
Journal of Intelligent & Robotic Systems