
Localization and Mapping in Large Environments Using Ultrasonic Sensors
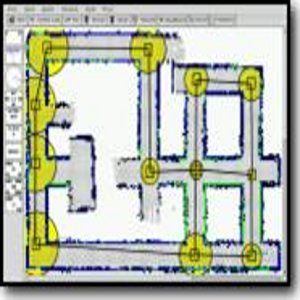
ATHRAIA (Advanced Three-layer Hybrid Robot Architecture for Intelligent Autonomy ) is a hybrid three-layer SLAM oriented robot control architecture organized in the three standard layers (Planning, Coordination and Behavior) and one World Modeller. It is able to guide a mobile robot safely through the environment, planning the paths to accomplish the mission, while building both topological and metric maps and correcting the errors in the robot position estimation.These tasks are performed without previous information about the environment or the robot position. SEFIRoT (Simulation Environment For Intelligent Robot Testing) is a graphical simulation environment for mobile robot and control architecture testing. Through this tool the user can change the simulation parameters easily, even during the simulation, and to see results through graphical items at any moment. The information to be displayed can be selected through the GUI, being the user able to concentrate on specific aspects of the simulation.
Project Leader

Project Collaborators


Related Publications
-
Towards Mapping and Localization in Large Environments Using Ultrasonic Sensors
-
The sNDT: A Grid-Based Likelihood Field Approach to Robust and Accurate Sonar Scan Matching Localization
-
ATHRAIA: Una Arquitectura de Control Híbrida per a la Construcció de Mapes Topològics i la Correcció de la Posició Durant la Navegació
-
A Probabilistic Framework for Sonar Scan Matching Localization
Advanced Robotics
-
On the use of likelihood fields to perform sonar scan matching localization
Autonomous Robots
-
Sonar Sensor Models and Their Application to Mobile Robot Localization
Sensors (MDPI)
-
A Solution for Integrating Map Building and Self Localization Strategies in Mobile Robotics
International Journal of Intelligent Systems
-
Mobile Robot Localization using Particle Filters and Sonar Sensors
Advances in Sonar Technology
-
Una herramienta para la experimentación con una celda robótica realimentada por visión
Jornadas de Enseñanza Universitaria de Informática (JENUI)
-
The Likelihood Field approach to Sonar Scan Matching
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
-
Sonar Scan Matching by Filtering Scans using Grids of Normal Distributions
International Conference on Intelligent Autonomous Systems (IAS)
-
Probabilistic Sonar Filtering in Scan Matching Localization
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
-
Probabilistic Sonar Scan Matching for Robust Localization
IEEE International Conference on Robotics and Automation (ICRA)
-
Probabilistic Filtering of Sonar Data
IFAC Symposium on Intelligent Autonomous Vehicles (IAV)
-
An Intelligent System for Simultaneous World Modelling and Localization
6th Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 100 - IOS Press)
-
ATHRAIA: A Hybrid Control Architecture for a World Modeller Robot
European Conference on Mobile Robots (ECMR)
-
A Robust System for Localization and Mapping While Navigating
International Conference on Advanced Robotics (ICAR)
-
Exploring an Unknown Environment with a Mobile Robot
IFAC Symposium on Intelligent Autonomous Vehicles (IAV)
-
Robust Scan Matching Localization Using Ultrasonic Range Finders
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
-
Achieving Accurate Mobile Robot Localization by Combining Topological Maps and Raw Sonar Readings
XXVI Jornadas de Automática 2005 (JA)