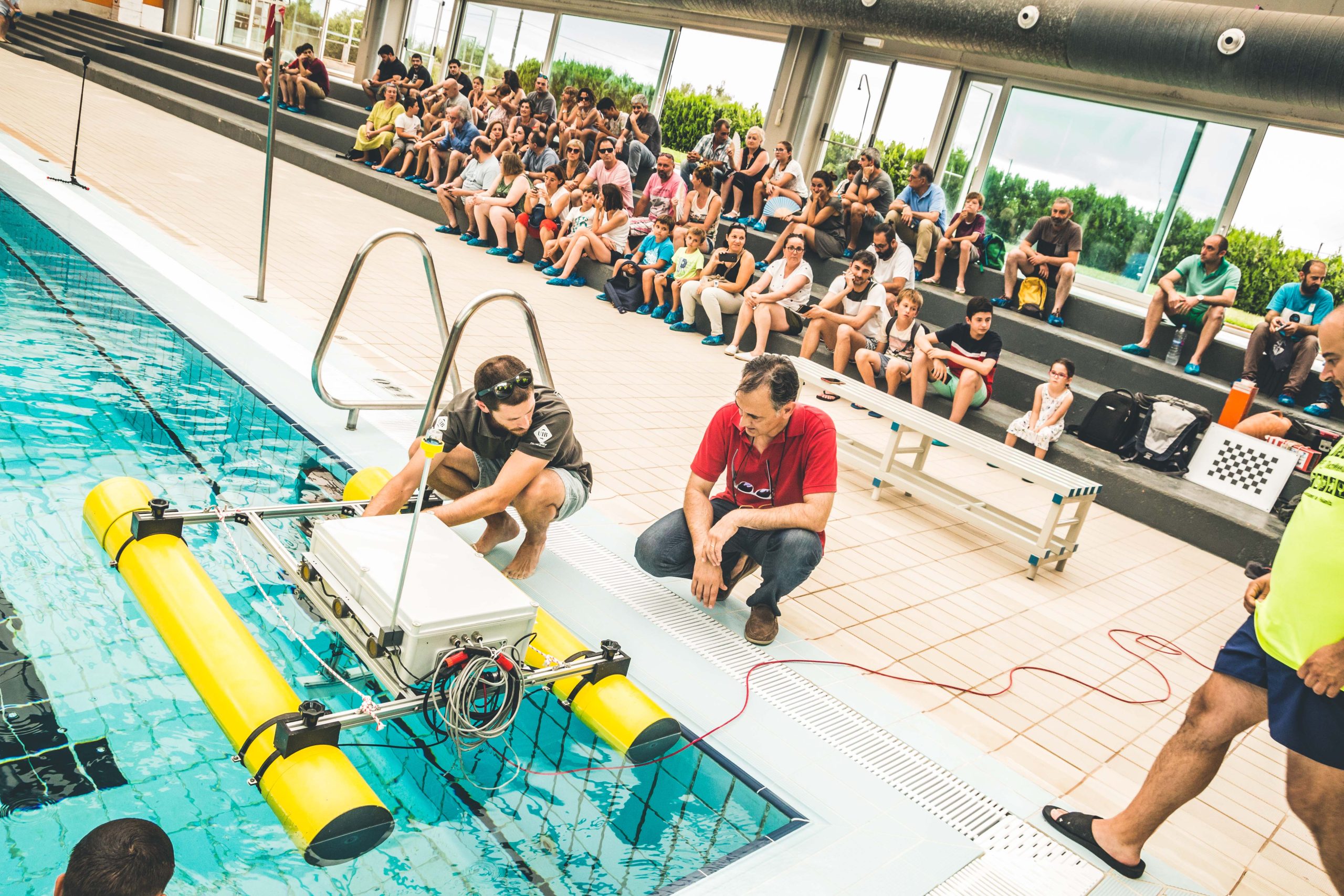
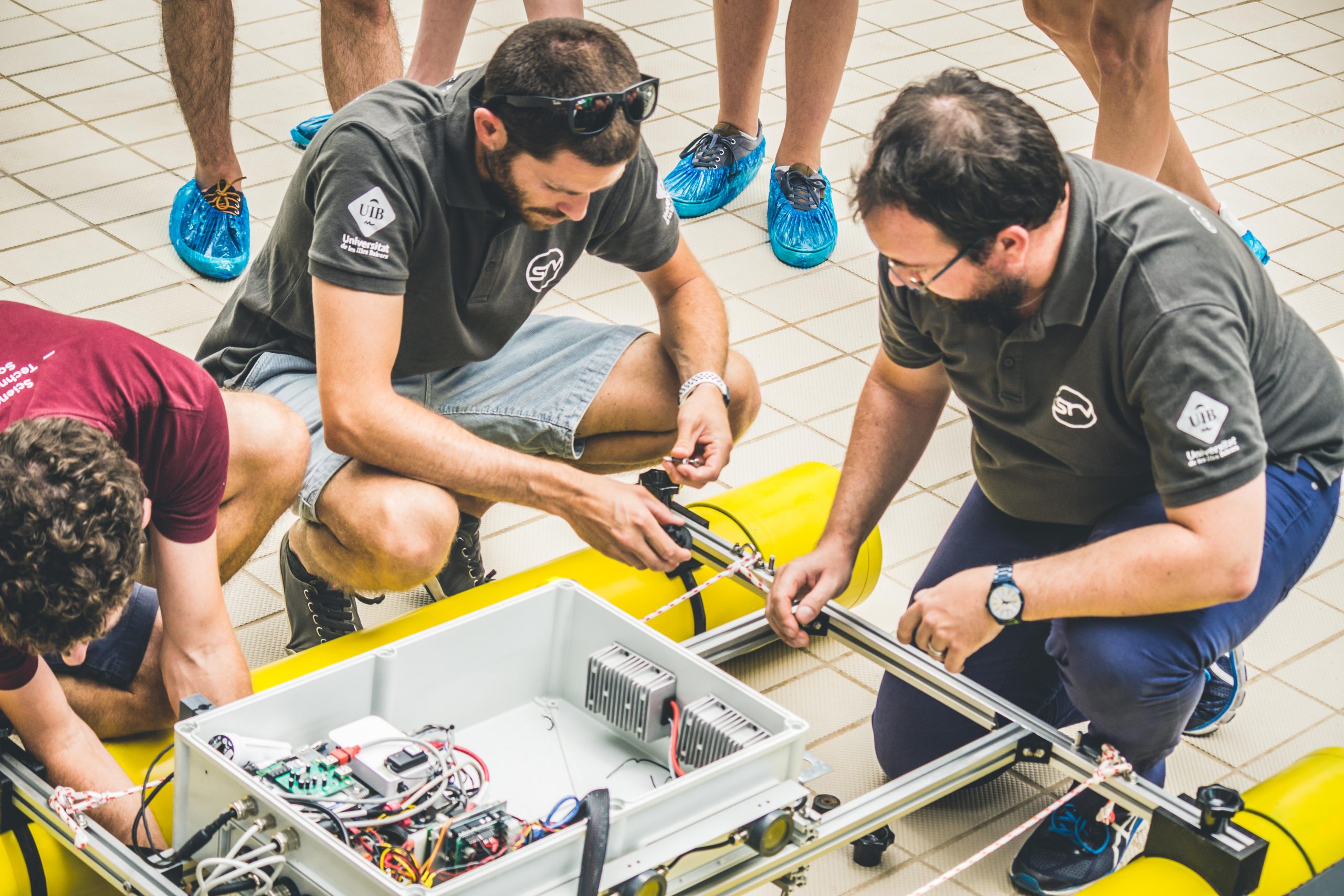
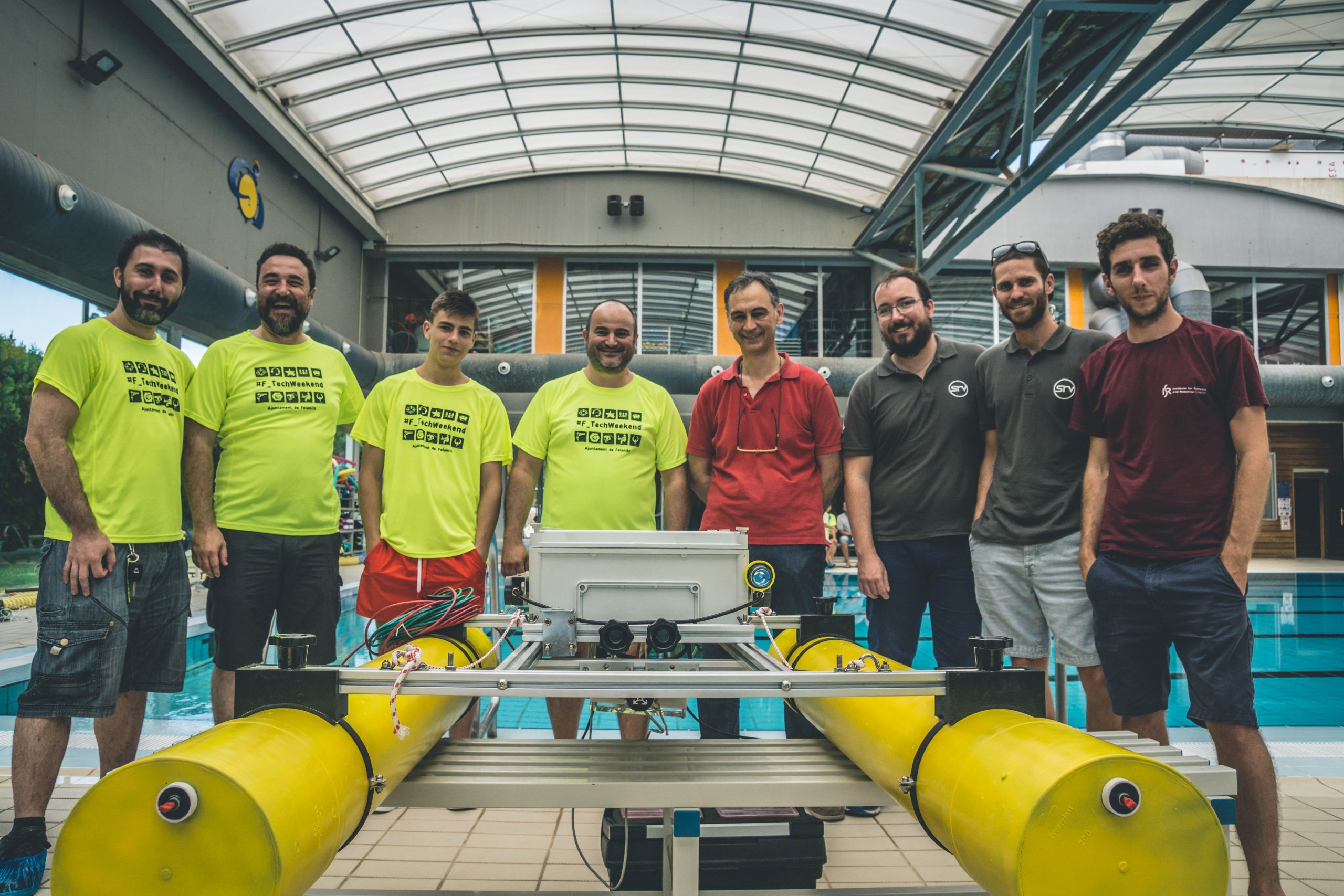
On the 6th of July, SRV showed a newly developed ASV called Xiroi. The platform was showcased during Felanitx Tech Weekend, where the activity arqROV made a practical introduction at 12-to-16-year-old children to the construction of vehicles, virtual reality, electronic circuits, 3D printing, application development and 360º audio-visual systems. The ultimate goal is to build a vehicle underwater ROV to perform a mission to locate and signalling underwater archaeological remains.