By: Miquel Massot Campos
Supervisor: Gabriel Oliver Codina
Last 15th November, our former member Miquel Massot Campos successfully defended his PhD at the University of the Balearic Islands.
Abstract
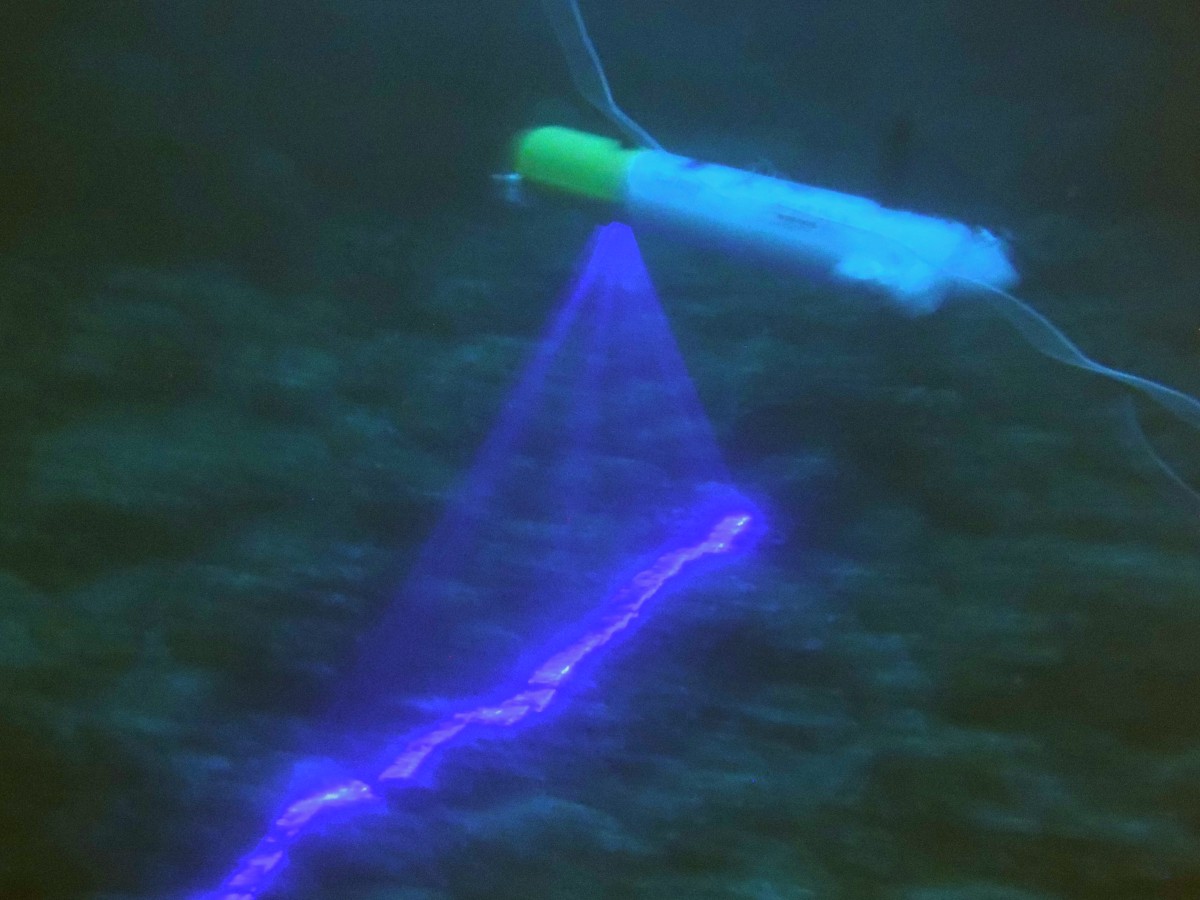
Three-dimensional visual maps of the seafloor provide objective information to reliably characterise these scenes. These maps are of great study value for archaeological sites or geologically interesting areas. Often, spatial scales over 8 orders of magnitude are needed, from the millimetre resolution to the > 100 km², to recognise key features of interest to areas over which they are distributed. Delivering precise resolution at scale has been an issue for the last decade. Nowadays, new vision-based sensors such as lasers and structured light provide a higher resolution than known acoustic sensors. Using these innovative sensors poses new challenges in underwater localization as most of the mapping error comes now from the self-localization rather than from the measurement sensor. This thesis presents two different solutions to the visual mapping problem. The first part of the PhD presents a novel laser-based structured light system to increase 3D perception resolution, accuracy and frame rate when compared to acoustic counterparts and cameras. The system consists of a laser Diffractive Optical Element (DOE) that diffracts the beam in 25 parallel planes and a camera to recover the intersected lines to the seafloor. We propose a calibration procedure and solve the correspondence problem using a Maximum Spanning Tree algorithm. The experimental results show that the system draws a better representation of the objects in front and outperforms plain stereoscopy in featureless scenarios. The second part of the thesis uses a standard laser stripe instead, to cast a single line on the seafloor, in a bathymetric SLAM solution to correct both the navigation and overall shape of the sensed environment. Two different algorithms are presented, one is sub-map bathymetric SLAM, which saves small map portions to be registered at a later stage using ICP and BPSLAM, a 2.5D grid that treats every scan as a particle in a Particle Filter to find the position that better suits the known map. The developed bathymetric SLAM algorithms are tested in a close-to-shore small rocky area in Valldemossa using the AUV SparusII and in a large survey in the Hydrate Ridge using the AUV AE2000f.