
SUPERION - Optical Systems for Enhanced Underwater Perception and Intervention
SUPERION is the UIB subproject of MERBOTS project. The other subprojects are ARCHROV, leaded by the University of Girona and MERMANIP, conducted by the University Jaume I, the coordinator of the project. MERBOTS is the natural evolution of RAUVI and TRITON projects. Even though both projects have led to a significant progress regarding all their challenging objectives, a serious advancement is needed regarding the robustness and the reliability of the corresponding systems, to achieve the perception capabilities required by the new scenario.
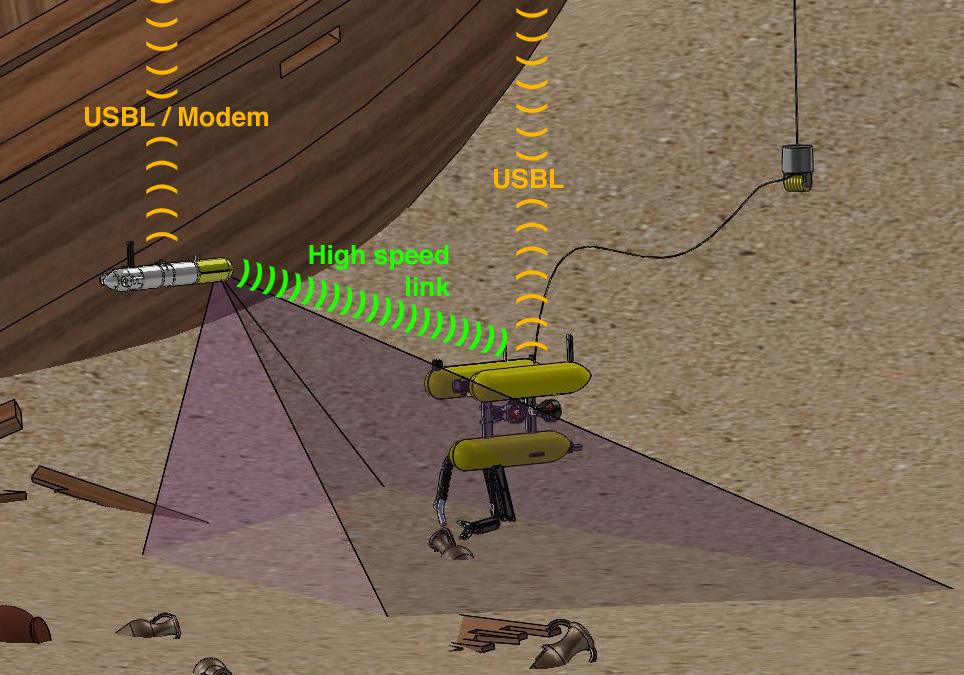
The project focuses on underwater archeology, although the same technologies could be applied to other scenarios. Two distinctive missions have been envisioned: the first one, cooperative survey, consists in an autonomous survey of a predefined search area by means of an AUV assisted by a surface vehicle that provides absolute localization and communication; the second mission, a cooperative intervention, entails a semi-autonomous intervention by means of an HROV assisted by an AUV providing out-of-body views of the intervention.
The UIB, leading the SUPERION subproject, is responsible for work packages centered on collecting optical data and providing 3D models of the area under study and seeking and modeling potential targets within the sensor data to assist the HROV operator. Thus, SUPERION focuses on two general objectives: enhance 3D reconstruction capabilities for underwater environments by means of optical sensors and improve target detection methods using multimodal sensor data. More specific sub-objectives stemming from the abovementioned are: (1) develop new stereo-SLAM methods to improve the self-localization capabilities of underwater vehicles and, thus, accurately derive the camera poses; (2) enhance 3D reconstruction methods able to deal successfully with the difficulties of underwater scenarios for both full scenes and targets; (3) develop new laser-based 3D modeling algorithms capable of underwater operation for increasing the level of detail at certain places of the environment, particularly the target area; (4) deal with multiple sensor modalities for improved scene modeling; (5) approach target detection in multimodal maps; (6) develop new target tracking methods making use of both 3D and visual-appearance models.
- MERBOTS official website: http://www.irs.uji.es/merbots/
Some videos from field trials:
Project Leader

Project Collaborators
-

José Guerrero Sastre
-

Javier Antich Tobaruela
-

Emilio García Fidalgo
-

Francisco Bonnín Pascual
-

Miquel Massot Campos
Reseacher at Ocean Infinity
-

Pep Lluis Negre Carrasco
Researcher at ROVCO Ltd
-

Francisco Bonin-Font
Related Publications
-
Towards Visual Loop Detection in Underwater Robotics using a Deep Neural Network
Intenational Conference on Computer Vision Theory and Applications (VISAPP)
-
Segmentation through patch classification: A neural network approach to detect Posidonia oceanica in underwater images
Ecological Informatics
-
Cluster-based Scan Matching for Robust Motion Estimation and Loop Closing
IEEE International Conference on Systems, Man, and Cybernetics
-
A Trajectory-Based Approach to Multi-Session Underwater Visual SLAM Using Global Image Signatures
Journal of Marine Science and Engineering
-
Design and control of an Autonomous Surface Vehicle to improve Link Communications
Design and control of an Autonomous Surface Vehicle to improve Link Communications
-
Underwater Localization using Probabilistic Sonar Registration and Pose Graph Optimization
IEEE OES Autonomous Underwater Vehicle Symposium
-
Deep Semantic Segmentation in an AUV for Online Posidonia Oceanica Meadows Identification
IEEE Access
-
Towards Multi Session Visual SLAM in Underwater Environments Colonized with Posidonia Oceanica
IEEE OES Autonomous Underwater Vehicle Symposium
-
Evaluating the Impact of Sewage Discharges on the Marine Environment with a Lightweight AUV
Marine Pollution Bulletin
-
Vision-Based Control for an AUV in a Multi-robot Undersea Intervention Task
Iberian Robotics Conference (ROBOT)
-
Towards a Pre-diagnose of Surgical Wounds Through the Analysis of Visual 3D Reconstructions.
International Conference on Computer Vision Theory and Applications (VISSAP)
-
Visual Discrimination and Large Area Mapping of Posidonia Oceanica Using a Lightweight AUV
IEEE Access
-
Indistinguishability Operators Applied to Task Allocation Problems in Multi-Agent Systems
Applied Sciences
-
A proposal toward a possibilistic multi-robot task allocation
Workshop Applied Topological Structures WATS'17
-
New Results on Possibilistic Cooperative Multi-Robot Systems
International Conference on Cooperative Design, Visualization and Engineering
-
Toward a Possibilistic Swarm Multi-robot Task Allocation: Theoretical and Experimental Results
Neural Processing Letters
-
Multifunctional Cooperative Marine Robots for Intervention Domains: Target Detection, Tracking and Recognition Issues
Jornadas Nacionales de Robótica (Spanish Robotics Workshop)
-
Visual Control of an AUV for Multi-Robot Intervention Tasks
Jornadas Automar (Marine Automation Workshop)
-
A Novel Approach to Register Sonar Data for Underwater Robot Localization
IEEE IntelliSys
-
Building Large-Scale Coverage Maps of Posidonia Oceanica using an Autonomous Underwater Vehicle
MTS/IEEE Oceans
-
Towards a new Methodology to Evaluate the Environmental Impact of a Marine Outfall Using a Lightweight AUV
MTS/IEEE Oceans
-
USBL Integration and Assessment in a Multisensor Navigation Approach for AUVs
The 20th World Congress of the International Federation of Automatic Control (IFAC World Congress)
-
Multi-Robot Coalitions Formation with Deadlines: Complexity Analysis and Solutions
PLoS ONE
-
A 3D Mapping, Obstacle Avoidance and Acoustic Communication Payload for the AUV SPARUS II
7th International Workshop on Marine Technology (MARTECH)
-
Submap Bathymetric SLAM using Structured Light in Underwater Environments
IEEE/OES Autonomous Underwater Vehicles (AUV)
-
An USBL-Aided Multisensor Navigation System for Field AUVs
IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI )
-
Towards Automatic Visual Sea Grass Detection in Underwater Areas of Ecological Interest
IEEE International Conference on Emerging Technologies and Factory Automation
-
Towards Visual Detection, Mapping and Quantification of Posidonia Oceanica using a Lightweight AUV
IFAC International Conference on Control Applications in Marine Systems
-
High-Resolution Underwater Mapping Using Side-Scan Sonar
PLOS ONE
-
Building High Resolution Maps of Large Subsea Areas Using Side-scan Sonar
Actas de las XXXVI Jornadas de Automática
-
Integración de técnicas ópticas de reconstrucción 3D para mejorar la planificación de agarres en tareas de manipulación arqueológica subacuática
Actas de las XXXVI Jornadas de Automática
-
iND: A significant improvement of the Nearness Diagram method for reactive mobile robot navigation
20th International Conference of the Catalan Association for Artificial Intelligence
-
A Comparative Analysis of Indistinguishability Operators Applied to Swarm Multi-Robot Task Allocation Problem
Cooperative Design, Visualization, and Engineering 14th International Conference, CDVE 2017
-
Reactive Navigation in Extremely Dense and Highly Intricate Environments
PLOS ONE