
TRIDENT — Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
A new methodology for multipurpose underwater intervention tasks with diverse potential applications like underwater archaeology, oceanography and offshore industries.
Trident develops new forms of cooperation between an Autonomous Surface Craft and an Intervention Autonomous Underwater Vehicle, going beyond present-day methods which are typically based on manned and / or purpose-built systems.
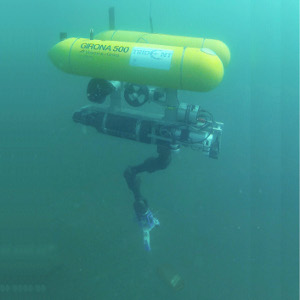
Firstly, the I-AUV performs a path following survey, where it gathers optical and / or acoustic data from the seafloor, whilst the ASC provides geo-referenced navigation data and communications with the end user. The motion of the ASC will be coordinated with that of the I-AUV for precise Ultra Short Base Line positioning and reliable acoustic communications. After the survey, the I-AUV docks with the ASC and sends the data back to a ground station where a map is set up and a target object is identified by the end user. Secondly, the ASC navigates towards a waypoint near the intervention area to search for the object. When the target object has been found, the I-AUV switches to free floating navigation mode. The manipulation of the object takes place through a dextrous hand attached to a redundant robot arm and assisted with proper perception. Particular emphasis will be put on the research of the vehicle’s intelligent control architecture to provide the embedded knowledge representation framework and the high level reasoning agents required to enable a high degree of autonomy and on-board decision making of the platform.
The new methodology will allow the user to specify an intervention task to be undertaken with regards to a particular target object, but after that the object is automatically recognised and manipulated by the robot in a completely autonomous way.
Project Leader

Project Collaborators
-

Alberto Ortiz Rodriguez
-

Yolanda González Cid
-

Antoni Burguera Burguera
-

Volker Nannen
Lecturer at University of Groningen
-

Javier Antich Tobaruela
-

Francisco Bonin-Font
-

Joan Pau Beltran Amengual
Secondary School Teacher
-
Stephan Wirth
Senior Roboticist at Savioke
-

Miquel Massot Campos
Reseacher at Ocean Infinity
-

Pep Lluis Negre Carrasco
Researcher at ROVCO Ltd
Related Publications
-
Intervention AUVs: The Next Challenge
Annual Reviews in Control
-
Stereo-Vision Graph-SLAM for Robust Navigation of the AUV SPARUS II
IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV)
-
Intervention AUVs: The Next Challenge
International Federation of Automatic Control World Congress (IFAC-WC)
-
Visual Sensing for Autonomous Underwater Exploration and Intervention Tasks
Ocean Engineering,
-
Multipurpose Autonomous Underwater Intervention: A System Integration Perspective
20th Mediterranean Conference on Control & Automation (MED)
-
RANSAC based data association for underwater visual SLAM
Proceedings of ROBOT 2013 - First Iberian Robotics Conference
-
Visual Odometry for Autonomous Underwater Vehicles
Proceedings of the IEEE/MTS Oceans Conference
-
Multisensor Aided Inertial Navigation in 6DOF AUVs using a Multiplicative Error State Kalman Filter
Proceedings of the IEEE/MTS Oceans Conference
-
Grid-Based Spatial Keypoint Selection for Real Time Visual Odometry
2nd International Conference on Pattern Recognition Applications and Methods
-
New Solutions in Underwater Imaging and Vision Systems
Imaging Marine Life
-
TRIDENT: Recent Improvements about Autonomous Underwater Intervention Missions
IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV’2012)
-
The UspIC: Performing Scan Matching Localization Using an Imaging Sonar
Sensors
-
A Monocular Mobile Robot Reactive Navigation Approach Based on the Inverse Perspective Transformation
Robotica
-
Optimal Number of Image Keypoints for Real Time Visual Odometry
IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV’2012)
-
Underwater SLAM with Robocentric Trajectory Using a Mechanically Scanned Imaging Sonar
International Conference on Intelligent Robotis and Systems (IROS)
-
Concurrent Visual Navigation and Localization using the Inverse Perspective Transformation
IET Electronic Letters
-
Recent advances in underwater robotics for intervention missions
Recent advances in underwater robotics for intervention missions: Sóller harbour experiments
-
Reconfigurable AUV for intervention missions: a case study on underwater object recovery
Intelligent Service Robotics
-
Imaging Systems for Advanced Underwater Vehicles
Journal Of Maritime Research
-
New approach for a reconfigurable autonomous underwater vehicle for intervention
IEEE Aerospace and Electronic Systems Magazine
-
A New Approach for a Reconfigurable Autonomous Underwater Vehicle for Intervention
4rd Annual IEEE International Systems Conference
-
Scan-Based SLAM with Trajectory Correction in Underwater Environments
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
-
Time Based Correspondences Using Sonar Scan Matching
IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)
-
Range Extraction from Underwater Imaging Sonar Data
IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)
-
A Measurement Model for Mobile Robot Localization using Underwater Acoustic Images
IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)
-
A Trajectory Based Framework to Perform Underwater SLAM using Imaging Sonar Scans
IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)
-
Underwater Scan Matching using a Mechanical Scanned Imaging Sonar
IFAC Symposium on Intelligent Autonomous Vehicles (IAV)
-
Visual Localization using Ground Points
Artificial Intelligence Research and Development
-
Towards Monocular Localization Using Ground Points
Proceedings of IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)
-
TRIDENT: A Framework for Autonomous Underwater Intervention Missions with Dexterous Manipulation Capabilities
7th Symposium on Intelligent Autonomous Vehicles IAV-2010
-
Recent Progress in the RAUVI Project: A Reconfigurable Autonomous Underwater Vehicle for Intervention
International Symposium ELMAR-2010
-
Visual Odometry Parameters Optimization for Autonomous Underwater Vehicles
Fifth International Workshop on Marine Technology