

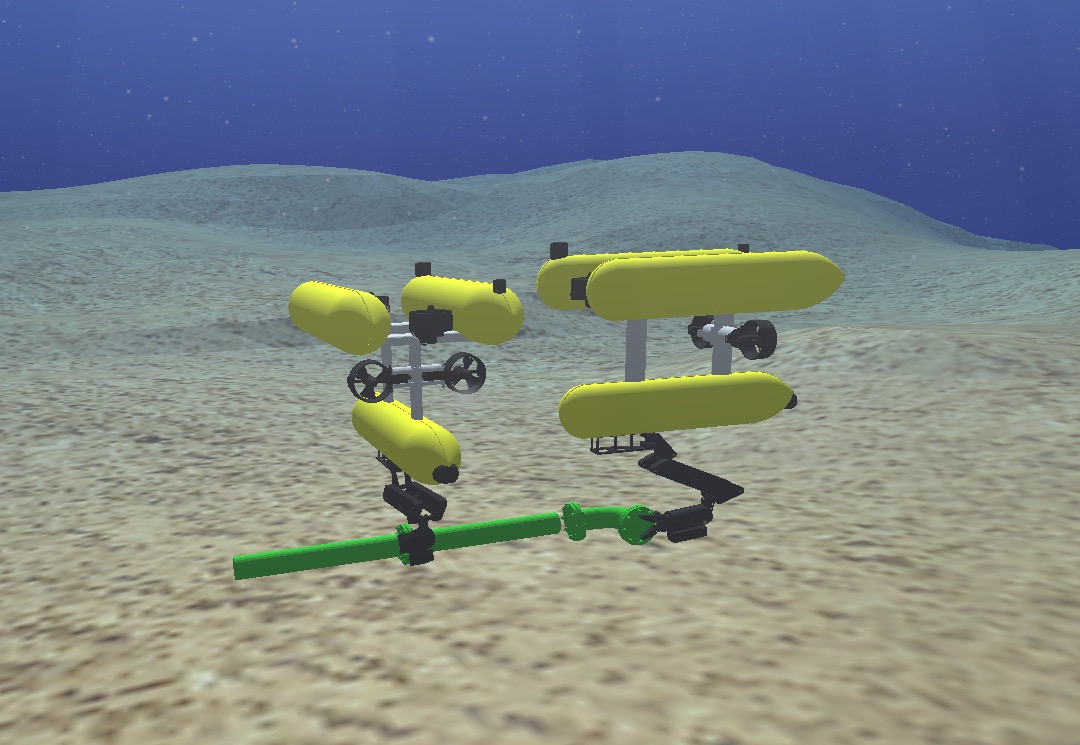
While commercially available Autonomous Underwater Vehicles (AUVs) are routinely used in survey missions, a new set of applications exist which clearly demand intervention capabilities. The maintenance of permanent underwater observatories, submerged oil wells, cabled sensor networks, pipes and the deployment and recovery of benthic stations are but a few of them. Nowadays, these tasks are addressed using manned submersibles or work-class ROVs (Remotely Operated Vehicle), equipped with teleoperated arms. Current Intervention-AUVs (I-AUVs) prototypes are big and complex systems exhibiting only a limited set of functionalities including docking and fixed based manipulation on a subsea panel, as well as search and recovery of simple objects. However, as in the case of human manipulation, more sophisticated applications, like transporting and manipulating bulky objects, or assembling complex structures underwater, would require several I-AUVs working cooperatively. This project aims to achieve a step forward beyond the current underwater intervention state of the art. The development of a new kind of I-AUVs, able to work autonomously, alone or in a cooperative way, opens the door to face the multi-purpose underwater intervention problem, with potential applications not only in the offshore and nuclear industries, but also in archeology, oceanography or search and rescue missions, among other purposes.
Partners: Universitat Jaume I de Castelló (Coordinator), Universitat de Girona, Universitat de les Illes Balear
Funded by: Ministerio de Economía, Industria y Competitividad. Agencia Española de Investigación
Duration: 2018-2020
TWINBOT official website: http://www.irs.uji.es/twinbot/twinbot.html
Project Leader

Project Collaborators
-

Francisco Bonin-Font
-
Photo
Jose Luís Lisani
-

Yolanda González Cid
-

Miquel Massot Campos
Reseacher at Ocean Infinity
-
Photo
Blair Thornton
Related Publications
-
Efficient Implementation of Deep Nets for Video Processing to Preserve Marine Ecosystem Services
Ph. D. Thesis
-
Robust Underwater Visual Graph SLAM using a Siamese Neural Network and Robust Image Matching
International Conference on Computer Vision Theory and Applications (VISAPP)
-
Adaptive Visual Information Gathering for Autonomous Exploration of Underwater Environments
IEEE Access
-
Lightweight Underwater Visual Loop Detection and Classification using a Siamese Convolutional Neural Network
13th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles (CAMS)
-
Image Hashing for Loop Closing in Underwater Visual SLAM
MARTECH - THE 9TH INTERNATIONAL WORKSHOP ON MARINE TECHNOLOGY
-
Improving Visual Odometry for AUV Navigation in Marine Environments
MARTECH - THE 9TH INTERNATIONAL WORKSHOP ON MARINE TECHNOLOGY
-
Sparse Gaussian Process for Online Seagrass Semantic Mapping
Expert Systems with Applications
-
Underwater Pipe and Valve 3D Recognition Using Deep Learning Segmentation
Journal of Marine Science and Engineering
-
NetHALOC: A learned global image descriptor for loop closing in underwater visual SLAM
Expert Systems
-
An Unsupervised Neural Network for Loop Detection in Underwater Visual SLAM
Journal of Intelligent & Robotic Systems
-
On-Line Multi-Class Segmentation of Side-Scan Sonar Imagery Using an Autonomous Underwater Vehicle
Journal of Marine Science and Engineering, MDPI, Special Issue Localization, Mapping and SLAM in Marine and Underwater Environments
-
Visual Loop Detection in Underwater Robotics: An Unsupervised Deep Learning Approach
Proceedings of the IFAC World Congress
-
Towards Multi-Robot Visual Graph-SLAM for Autonomous Marine Vehicles
Journal of Marine Science and Engineering
-
Autonomous Marine Vehicles and CNN: Tech Tools for Posidonia Meadows Monitoring
IEEE Oceans
-
Decision-time Adaptive Replanning (DAR) Behavior for Benthic Environment Monitoring using AUVs
IEEE ICRA (International Conference on Robotics and Automation) 2021, 1st Advanced Marine Robotics Tc WorkShop: Active Perception
-
Jellytoring: Real-Time Jellyfish Monitoring Based on Deep Learning Object Detection
MDPI Sensors