
Navigation and Obstacle Avoidance in Troublesome Scenarios Using Ultrasonic Sensors
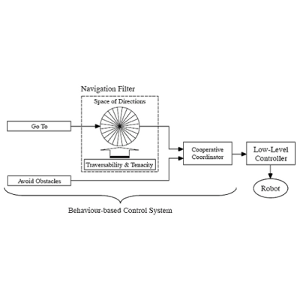
By means of the application of the Traversability and Tenacity principles, T2 strategies solve the well-known local minima problem of potential-field-based control methods. On the basis of these two principles, a new family of geometric algorithms for sensor- based motion planning has been proposed: random-T2 , bug-T2 , and connectivity-T2.
NEMOCAT (Navigational Environment MOdeller, Control and Architecture Tester) is a 3D object-oriented simulator developed to validate and tune reactive and hybrid AUVs control architectures based on schema theory and potential fields.
Project Leader

Project Collaborators

Related Publications
-
A Dynamic Window Approach to Navigate in Complex Scenarios using Low-Cost Sensors for Obstacle Detection
Technical Report A-04-2007, Dep. Mathematics and Computer Science (UIB)
-
Reactive Robotics: A Paradigm Not Limited to Simple Tasks
-
Behaviour-based Control of an Underwater Cable Tracker
Technical Report A-04-2003, Dep. Mathematics and Computer Science (UIB)
-
T2: An Approach to Robotic Navigation in Unknown and Dynamic Enviroments
Technical Report A-03-2004, Dep. Mathematics and Computer Science (UIB)
-
Reactive Navigation in Troublesome Environments: T2 Strategies
Instrumentation Viewpoint
-
Bayesian Visual Tracking for Inspection of Undersea Power and Telecommunication Cables
Journal of Maritime Research (JMR)
-
Pipe and cable inspection in the AIRSUB project context
Instrumentation Viewpoint
-
Development of the Control Architecture of a Vision-guided Underwater Cable Tracker
International Journal of Intelligent Systems
-
A PFM-based Control Architecture for a Visually Guided Underwater Cable Tracker to Achieve Navigation in Troublesome Scenarios
Journal of Maritime Research
-
Reactive control of a visually guided underwater cable tracker
Robotics and Automation in the Maritime Industries
-
Traversabillity and tenacity: Two new concepts improving the navigation capabilities of reactive control systems
Robotics and Automation in the Maritime Industries
-
A Bayesian Approach for Tracking Undersea Narrow Telecommunication Cables
MTS/IEEE Oceans
-
Experimental Evaluation of a Particle Filter-based Approach for Visually Tracking Undersea Cables
IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC)
-
A Bug-Inspired Algorithm for Efficient Anytime Path Planning
IEEE International Conference on Intelligent Robots and Systems (IROS)
-
ABUG: A Fast Bug-derivative Anytime Path Planner with Provable Suboptimality Bounds
IEEE International Conference on Advanced Robotics (ICAR)
-
A Rapid Anytime Path Planner with Incorporated Range Sensing to Improve Control on Solution Quality
International Conference on Intelligent Autonomous Systems (IAS)
-
A Convergent Dynamic Window Approach with Minimal Computational Requeriments
International Conference on Intelligent Autonomous Systems (IAS)
-
Learning by Example: Reinforcement Learning Techniques for Real Autonomous Underwater Cable Tracking
IEEE/IFAC International Conference on Informatics in Control, Automation and Robotics (ICINCO)
-
A Goal-directed Reactive Obstacle Avoidance Strategy with Global Proofs
IFAC Symposium on Intelligent Autonomous Vehicles (IAV)
-
Underwater Cable Tracking by Visual Feedback
First Iberian Conference on Pattern Recognition and Image Analysis (IbPRIA, LNCS 2652)
-
Experimental Evaluation of the Control Architecture of an Underwater Cable Tracker
IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC)
-
A Behaviour-based Control Architecture for Visually Guiding an Underwater Cable Tracker
First IFAC Workshop on Guidance and Control of Underwater Vehicles (GCUV)
-
Evolutionary Tuning of the Control Architecture of an Underwater Cable Tracker
Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 100 - IOS Press)
-
An Underwater Simulation Environment for Testing Autonomous Robot Control Architectures
IFAC Conference on Control Applications in Marine Systems (CAMS)
-
Testing the Control Architecture of a Visually Guided Underwater Cable Tracker by using a UUV Prototype
IFAC Symposium on Intelligent Autonomous Vehicles (IAV)
-
Bug-based T2: A New Globally Convergent Approach to Reactive Navigation
Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 131 - IOS Press)
-
Extending the Potential Fields Approach to Avoid Trapping Situations
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
-
A Control Strategy for Fast Obstacle Avoidance in Troublesome Scenarios: Application in Underwater Cable Tracking
IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC)
-
Bug-based T2: A New Globally Convergent Potential Field Approach to Obstacle Avoidance
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)