
Distributed Embedded Systems (DESs) typically have dependability and real-time requirements. Moreover, when they are deployed in dynamic environments, they must be flexible enough to adapt to changes in the operation requirements. The Fault Tolerance for Flexible Time-Triggered Ethernet (FT4FTT) project aims at providing a Switched-Ethernet architecture, based on the Flexible Time-Triggered communication paradigm (FTT), that is flexible and highly reliable. In particular, FT4FTT provides node fault-tolerance by means of active replication with majority voting. In this sense, FT4FTT includes the Consistent Replicated Voting (CRV) protocol to enforce replica determinism, even in presence of faults, while maximizing the reliability that can be achieved thanks to the node redundancy and the communication subsystem itself. This papers presents a first implementation of this protocol in a real prototype, and shows the on-going experimental evaluation been carried out to asses its correctness.
Publication type: Conferences
A distributed embedded system (DES) is made up of a set of computing nodes interconnected by a network. If we want the DES to continue to operate even if a subset of its network elements fail, the network must be fault-tolerant. In particular, this requires that the architecture of the network provides redundant paths between nodes and that any elements critical for the operation of the network are replicated. In the context of DES that must not only be highly reliable, but also provide sufficient flexibility to adapt to unpredictable requirement changes, the Flexible Time-Triggered Replicated Star for Ethernet (FTTRS) has been proposed. One of the core features of FTTRS is precisely its fault-tolerant network architecture. In this paper we present a proof-of-concept prototype of FTTRS and a series of fault-injection experiments. These experiments show that FTTRS can tolerate the crash of any single network element, as well as the crash of various combinations of multiple network elements. A variety of omission failures affecting the most critical FTTRS message (called the trigger message) are also tolerated.
The results of the experiments are available at FTTRS logs.zip.
While commercially available AUVs are routinely used in survey missions, a new set of applications exists which clearly demand intervention capabilities. The maintenance of: permanent observatories underwater; submerged oil wells; cabled sensor networks; pipes; and the deployment and recovery of benthic stations are but a few of them. These tasks are addressed nowadays using manned submersibles or work-class ROVs, equipped with teleoperated arms under human supervision. Although researchers have recently opened the door to future I-AUVs, a long path is still necessary to pave the way to underwater intervention applications performed in an autonomous way. This paper reviews the evolution timeline in autonomous underwater intervention systems. Milestone projects in the state of the art are reviewed, highlighting their principal contributions to the field. To the best of the authors knowledge only three vehicles have demonstrated some autonomous intervention capabilities so far: ALIVE, SAUVIM and GIRONA 500 I-AUV. Next, GIRONA 500 I-AUV is presented and its software architecture discussed. Recent results in different scenarios are reported: 1) Valve turning and connector plugging/unplugging while docked to a sub-sea panel, 2) Free floating valve turning using learning by demonstration, and 3) Free floating multipurpose multisensory based object recovery. The paper ends discussing the lessons learned so far and presenting the authors view of the future.
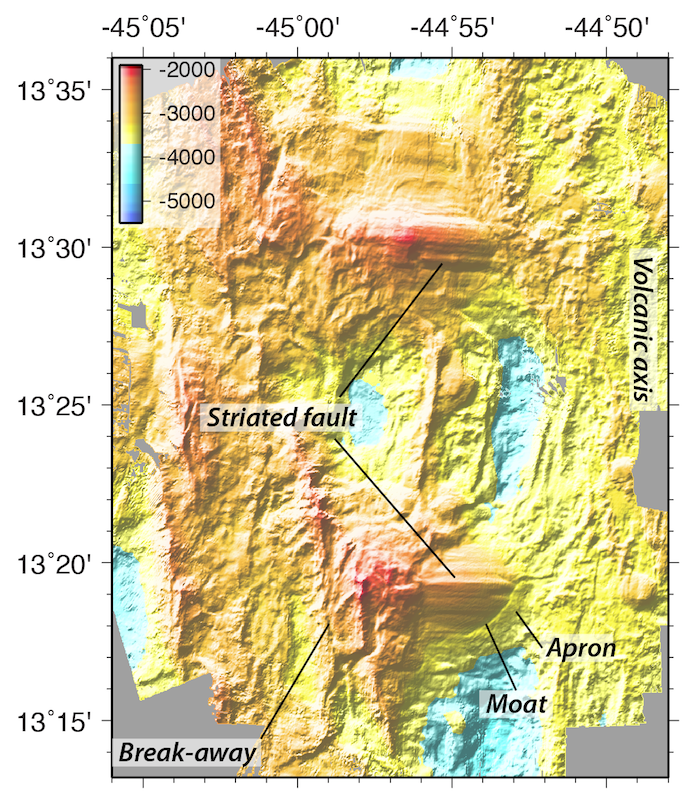
Oceanic detachment faults (ODs) are known to play a significant role in oceanic crustal accretion along slow-spreading ridges, and many display a poorly understood corrugated fault surface. The ODEMAR cruise (Nov-Dec’14) studied the 13°20’N and 13°30’N ODs along the Mid-Atlantic Ridge via extensive microbathymetric surveys with AUV ABYSS (GEOMAR), combined with geological observations and sampling using ROV VICTOR (IFREMER).
The 13°20’N OD is largely intact, with an undisrupted corrugated surface. An abrupt, continuous moat where the OD emerges from the seafloor sloping at ~12-18° continuously sheds rubble onto the OD fault plane, blanketing it. An apron surrounds the detachment dipping ~10-14° towards volcanic rift valley floor thus forming a thin wedge above the active OD fault, which uplifts hangingwall material. In contrast, the 13°30’N OD is cut by recent high-angle faults, and is likely inactive. The OD fault is well exposed along these recent high angle fault scarps, and along mass wasting scarps.
The OD fault displays individual microbathymetric lineations throughout the >150 m of fault zone thickness, that are traced up to ~2 km in the spreading direction. Flanks of individual lineations display fault planes extending ~20-100 m laterally with well-developed, extension-parallel striae. At 13°20’N. These fault surfaces are primarily basalt fault breccias and minor serpentinite. At 13°30’N the scarps cutting the detachment system reveal highly heterogeneous deformation, with phacoidal blocks of undeformed peridotite, gabbro, and basalt enclosed in anastomosing shear zones. Basalt often shows greenschist grade alteration, and is only present in the upper 50 m of the OD fault zone.
In detail, OD faults are characterized by anastomosing zones of localized, strongly anisotropic deformation at different scales (m to km), bounding bodies of largely undeformed rock (basalt, gabbro, peridotite) elongated in the extension direction. Hangingwall material (basalt and dolerite) gets reworked into the fault zone in the green schist facies and effectively accreted to the footwall, both as fault breccia and as large blocks within the fault. Such fine-scale, in situ observations provide unprecedented insights into the three-dimensional and heterogeneous strain localization at OD fault zones.
 Direct observations of coseismic fault displacement and rupture-related features are essential to understand seismic cycles, to quantify seismic hazard, and to constrain rupture dynamics. They are also needed to trace the paleoseismic history of active faults. Such observations in submarine environments are practically absent, but critical to assess associated tsunami hazard. The ODEMAR cruise studied a ~10 km section of the Roseau Fault (RF) off Les Saintes Islands (Guadeloupe, French Lesser Antilles), a normal fault that generated a Mw 6.3 earthquake in 2004 that triggered a tsunami (<3.5 m of run-up). Microbathymetric data and video observations conducted with the autonomous underwater vehicle ABYSS (GEOMAR) and the remotely operated vehicle VICTOR (IFREMER) allow us to document recent fault-related deformation features.
Direct observations of coseismic fault displacement and rupture-related features are essential to understand seismic cycles, to quantify seismic hazard, and to constrain rupture dynamics. They are also needed to trace the paleoseismic history of active faults. Such observations in submarine environments are practically absent, but critical to assess associated tsunami hazard. The ODEMAR cruise studied a ~10 km section of the Roseau Fault (RF) off Les Saintes Islands (Guadeloupe, French Lesser Antilles), a normal fault that generated a Mw 6.3 earthquake in 2004 that triggered a tsunami (<3.5 m of run-up). Microbathymetric data and video observations conducted with the autonomous underwater vehicle ABYSS (GEOMAR) and the remotely operated vehicle VICTOR (IFREMER) allow us to document recent fault-related deformation features.
First, the RF hangingwall shows an indurated and ubiquitous rippled sediment layer, locally covered by recent, unconsolidated sediments reworked by currents. Seafloor photomosaics show the indurated layer disrupted by extensional cracks (up to few m long, several 10s of cm wide, ~30 cm deep) along >1 km and by the RF scarp base, that are certainly very young as they are not covered by unconsolidated sediments.
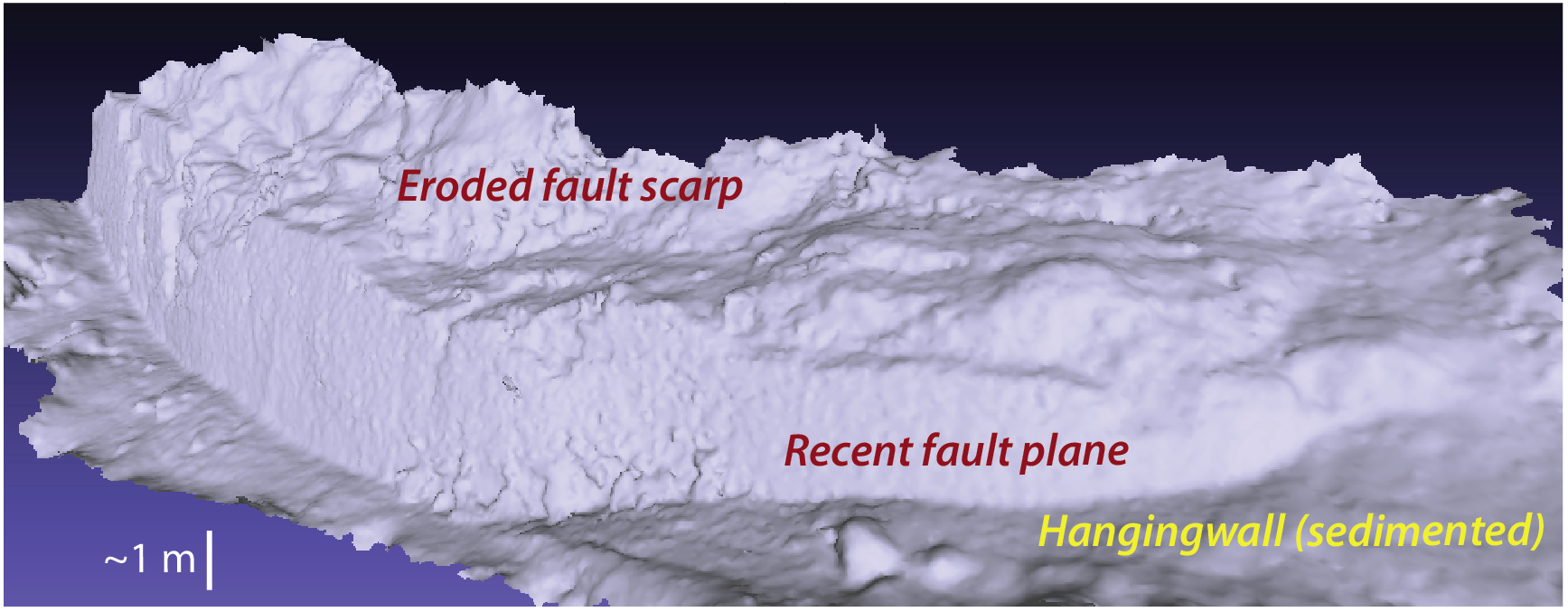
Second, video imagery reveals well-preserved, subvertical and polished fault planes exposed at the RF scarp base. Videomosacing and video derived 3D terrain models of a fault outcrop (~12 m long, ~5 m high) reveal on the fault plane a thin, continuous line of unconsolidated sediment sub-parallel to and 10s’ of cm above the fault/sediment contact. The line represents the paleo-fault/sediment contact prior to a very recent displacement event, as strong currents in the area would otherwise have washed out the sediment. The fault surface above this line is rougher than that below it.
Based on the apparent young age of these features, and given the recurrence time of seismic events along the RF (hundreds to a few thousands of years for Mw 6 earthquakes), we attribute them to the 2004 Saintes event. High-resolution bathymetry, videomosaicing, and 3D terrain models thus provide critical constraints on coseismic deformation: We document the rupture of >1.5 km of the RF, and we quantify a coseismic vertical displacement of at least 0.8 m, constraining model-derived estimates of fault displacement.