This video contains a summary description of the INCASS MAV prototype developed by members of the SRV group, highlighting the supervised autonomy control approach and a set of behaviours oriented to visual inspection.
 Systems, Robotics & Vision Group
Systems, Robotics & Vision Group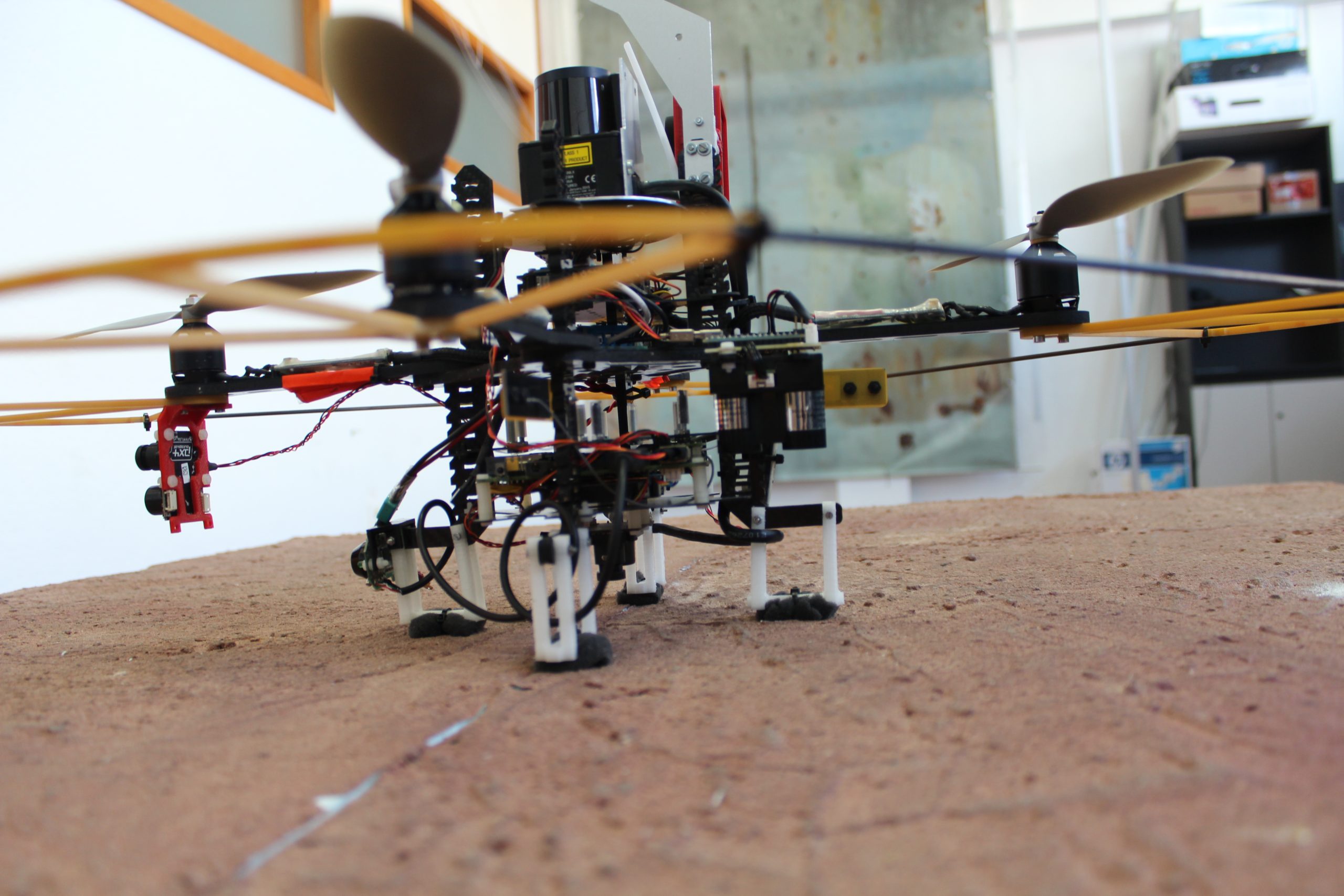
This video contains a summary description of the INCASS MAV prototype developed by members of the SRV group, highlighting the supervised autonomy control approach and a set of behaviours oriented to visual inspection.