Duration | 2020 - 2022
Project leader | Hilmar Hinz
Collaborators | Yolanda González Cid | Gabriel Oliver Codina | Francisco Bonin-Font
DESCRIPTION

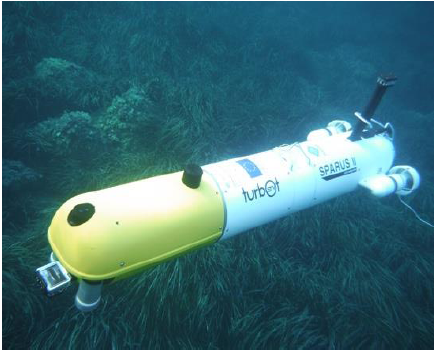
The underwater robotics team of the System, robotics and Vision Group participates in the TRASMAR project with the SPARUS II robot. TRASMAR is a project of the PLEAMAR Program, in association with the Fundación Biodiversidad, the European Union and the Maritime and Fishing European Funding .
The "Trasmallo" is a Mediterranean traditional fishing technique. It is used to fish lobters, cuttlefish and red mullet. Although the static fishing techniques have less impact on the environment than the draggin fishing, lately it has been demonstrated that the "Trasmallo" causes a high mortality of non comercial species, specially in Posidonia Oceanica, and invertebrates. TRASMAR is a project to innovate in the improvement of these fishing techniques in order to protect the marine environments with the consensus of the fishing sector. Our AUV participates in the project for the inspection of these nets once they are mounted since they can be up to 2 Kilo meters long and using the robot makes easier and more effective the proces of data collection than using divers.