Intervention AUVs: The Next Challenge
While commercially available AUVs are routinely used in survey missions, a new set of applications exists which clearly demand intervention capabilities. The maintenance of: permanent observatories underwater; submerged oil wells; cabled sensor networks; pipes; and...Trajectory-Based Visual Localization in Underwater Surveying Missions
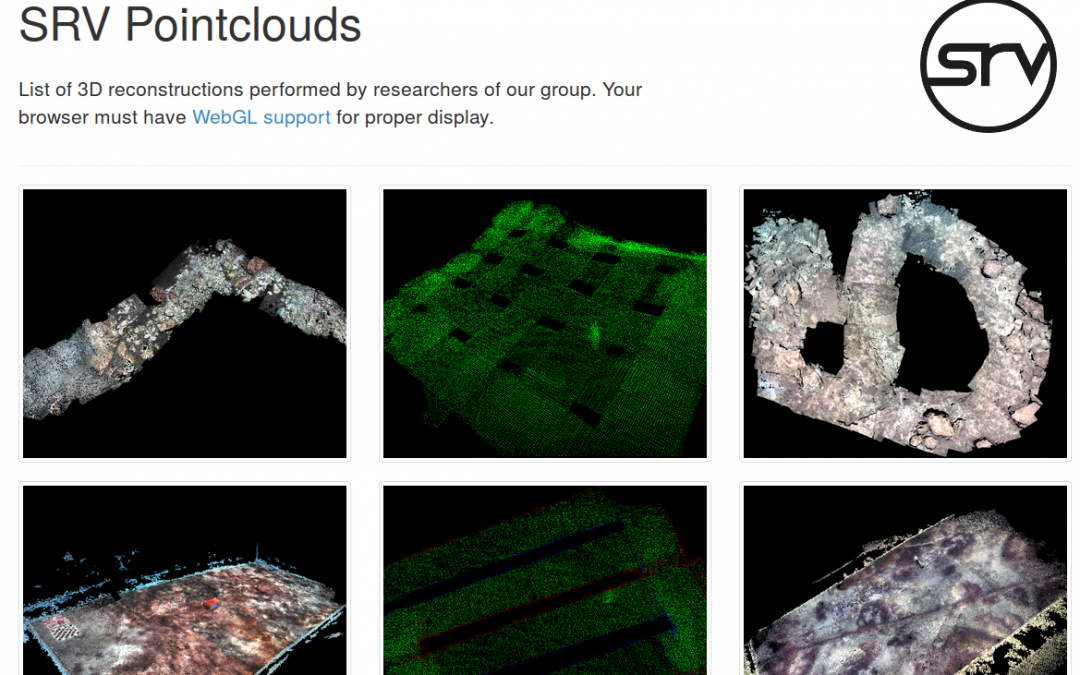
We present a new vision-based localization system applied to an autonomous underwater vehicle (AUV) with limited sensing and computation capabilities. The traditional EKF-SLAM approaches are usually expensive in terms of execution time; the approach presented in this...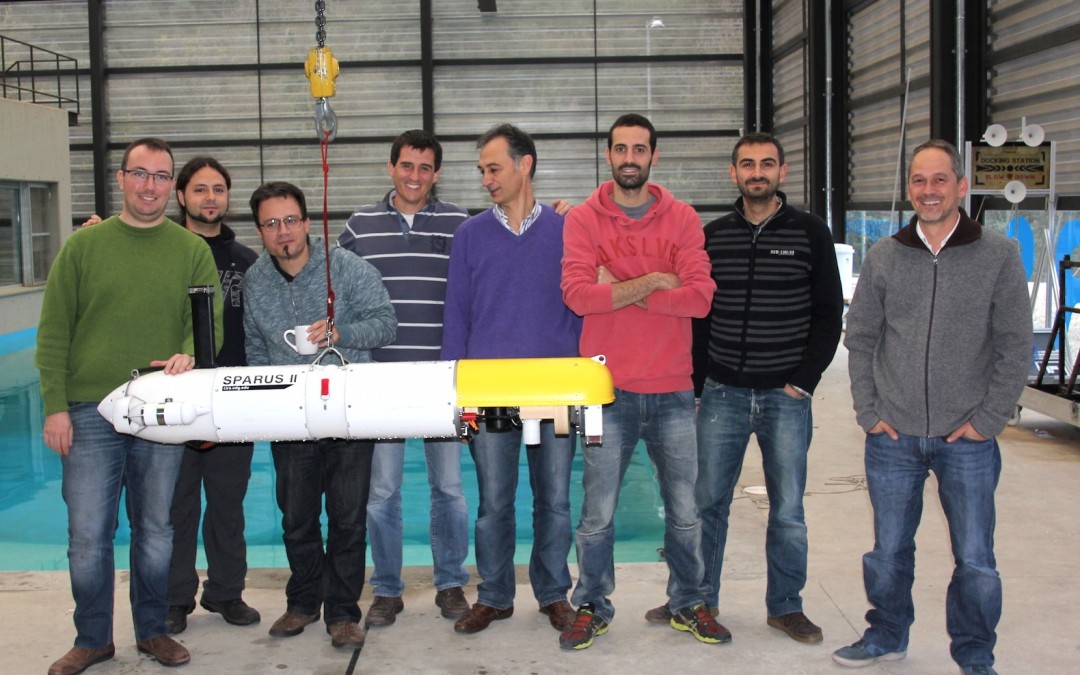
SPARUS II: A new robot in the family
Last week from 1st to 5th of December our team went to Girona to pick up our new acquisition SPARUS II. During the week, our team learnt how to operate and maintain it, as well as how to mount new sensors onboard. Right now, SRV has mounted an stereo rig, two...