
Ultrasonic Navigation and Obstacle Avoidance
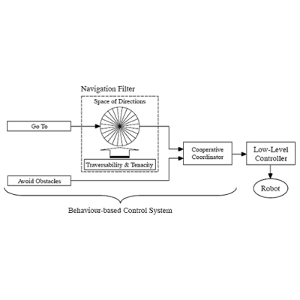
By means of the application of the Traversability and Tenacity principles, T2 strategies solve the well-known local minima problem of potential-field-based control methods. On the basis of these two principles, a new family of geometric algorithms for sensor- based...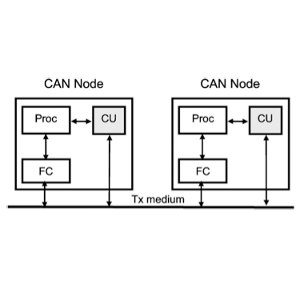
OCS-CAN

Ultrasonic Localization and Mapping
ATHRAIA (Advanced Three-layer Hybrid Robot Architecture for Intelligent Autonomy ) is a hybrid three-layer SLAM oriented robot control architecture organized in the three standard layers (Planning, Coordination and Behavior) and one World Modeller. It is able to guide...