

IDAV
The main goal of the IDAV project (Desarrollo y test de estrategias de inspección y documentación visual automatizada de grandes estructuras mediante un vehículo aéreo autónomo) is to develop a prototype of an aerial platform for inspection and visual documentation of...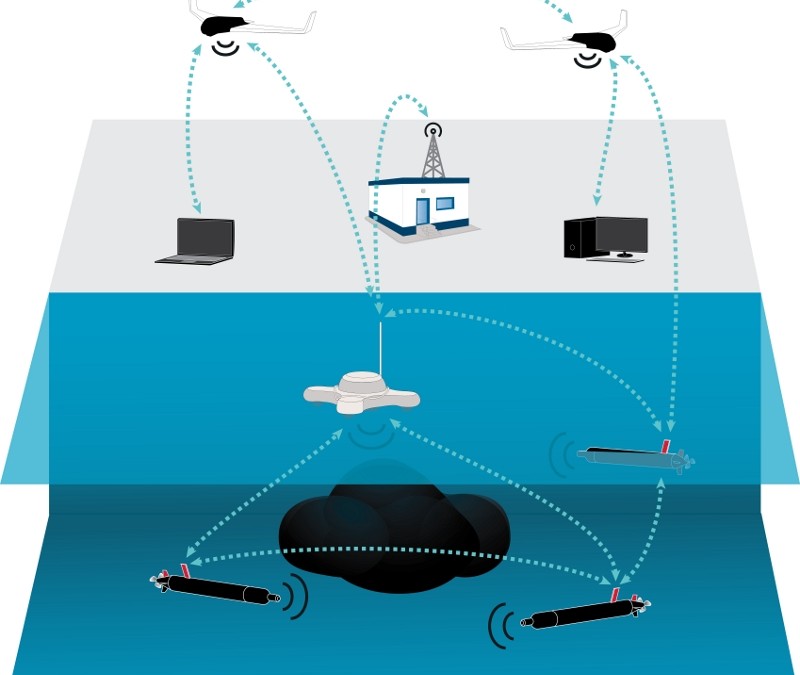
eUReady4OS
Project website Project reference: ECHO/SUB/2016/740129/PREP/21 Coordinator: Dr. Javier Gilabert, Universidad Politècnica de Cartagena Budget: 774.739 € Duration: 01/01/17 – 31/12/18 UIB Project Coordinator: Dr. Gabriel Oliver Objectives Expand the already existing...
MOCAP
The main goal of the MOCAP project (Sistema de seguimiento de micro-vehículos aéreos para evaluación de prestaciones en aplicaciones de inspección) is to set up a motion capture system to characterize and validate the Micro-Aerial Vehicles (MAV) prototyped by the SRV...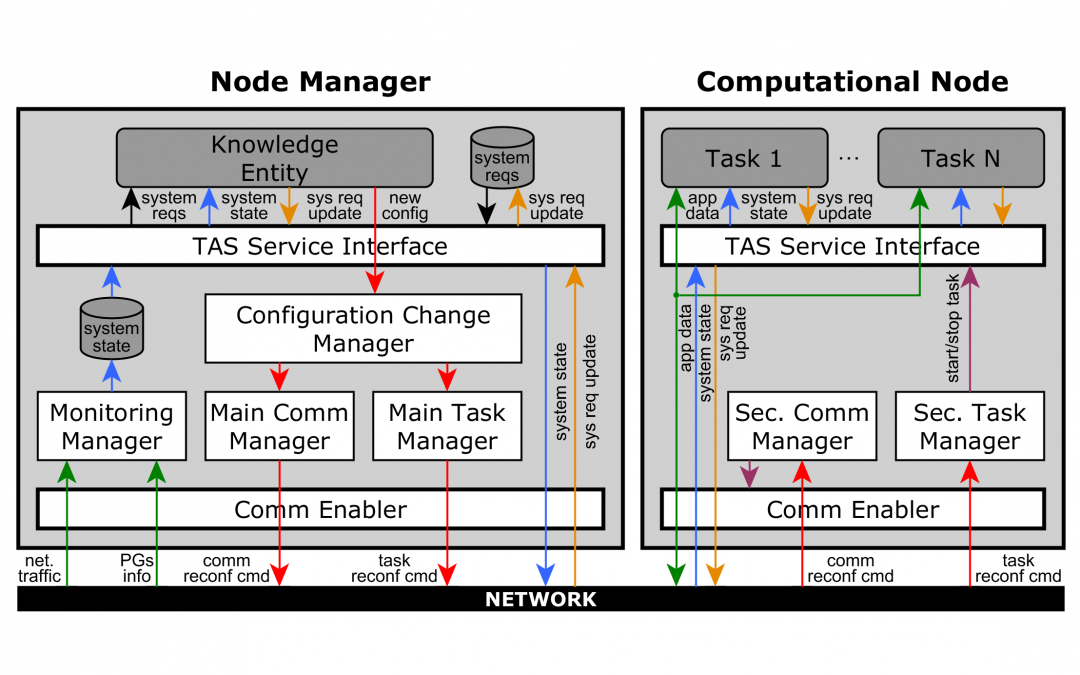
DFT4FTT
This work is supported in part by the Spanish Agencia Estatal de Investigación (AEI) and in part by FEDER funding through grant TEC2015-70313-R (AEI/FEDER, UE). Adaptive embedded systems should be able to automatically adjust their internal strategies in response to...