
RCMBnet
Design, formal verification and implementation of a hardware support for the consistent execution of fault-tolerant software that follows the N-Version Programming approach. Software is a major source of reliability degradation in dependable systems. One of the...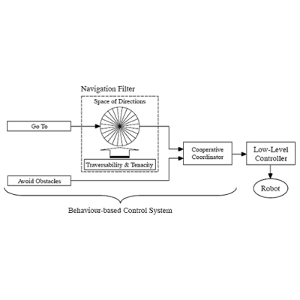
Ultrasonic Navigation and Obstacle Avoidance
By means of the application of the Traversability and Tenacity principles, T2 strategies solve the well-known local minima problem of potential-field-based control methods. On the basis of these two principles, a new family of geometric algorithms for sensor- based...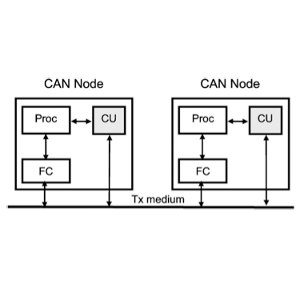
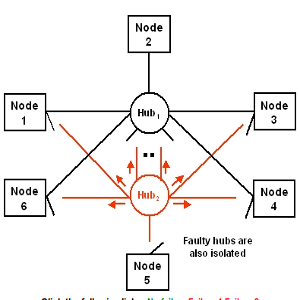
OCS-CAN

Ultrasonic Localization and Mapping
ATHRAIA (Advanced Three-layer Hybrid Robot Architecture for Intelligent Autonomy ) is a hybrid three-layer SLAM oriented robot control architecture organized in the three standard layers (Planning, Coordination and Behavior) and one World Modeller. It is able to guide...