Type | PhD project
Duration | -
Project leader | Javier Antich Tobaruela
Collaborators | Alberto Ortiz Rodriguez
Duration | -
Project leader | Javier Antich Tobaruela
Collaborators | Alberto Ortiz Rodriguez
FOCUS
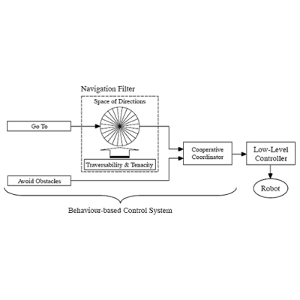
Development of navigation strategies allowing a robot to navigate safely avoiding obstacles in unstructured and dynamic environments. Consequently, a special emphasis is put on architecture reactivity, and, thus, on control architectures requiring minimum amounts of computation and memory storage. Main results of this research are the T 2 navigation strategies and the NemoCAT simulator.
DESCRIPTION
By means of the application of the Traversability and Tenacity principles, T2 strategies solve the well-known local minima problem of potential-field-based control methods. On the basis of these two principles, a new family of geometric algorithms for sensor- based motion planning has been proposed: random-T2 , bug-T2 , and connectivity-T2.
NEMOCAT (Navigational Environment MOdeller, Control and Architecture Tester) is a 3D object-oriented simulator developed to validate and tune reactive and hybrid AUVs control architectures based on schema theory and potential fields.
PUBLICATIONS
J. Antich, A. Ortiz. T2: An Approach to Robotic Navigation in Unknown and Dynamic Enviroments. In Technical Report A-03-2004, Dep. Mathematics and Computer Science (UIB), 2004.
J. Antich, A. Ortiz. Behaviour-based Control of an Underwater Cable Tracker. In Technical Report A-04-2003, Dep. Mathematics and Computer Science (UIB), 2003.
J. Antich. Reactive Robotics: A Paradigm Not Limited to Simple Tasks. 2006.
J. Antich, A. Ortiz. A Dynamic Window Approach to Navigate in Complex Scenarios using Low-Cost Sensors for Obstacle Detection. In Technical Report A-04-2007, Dep. Mathematics and Computer Science (UIB), 2007.
J. Antich, A. Ortiz. Reactive Navigation in Troublesome Environments: T2 Strategies. In Instrumentation Viewpoint, vol. , no. 6, pp. 51--52, 2007.
J. Antich, A. Ortiz. Bug-based T2: A New Globally Convergent Potential Field Approach to Obstacle Avoidance. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing (China), 2006.
J. Antich, A. Ortiz, G. Oliver. A Control Strategy for Fast Obstacle Avoidance in Troublesome Scenarios: Application in Underwater Cable Tracking. In IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC), Lisbon (Portugal), 2006.
J. Antich, A. Ortiz. Extending the Potential Fields Approach to Avoid Trapping Situations. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Edmonton (Canada), 2005.
J. Antich, A. Ortiz. Bug-based T2: A New Globally Convergent Approach to Reactive Navigation. In Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 131 - IOS Press), Alguero (Sardinia, Italy), 2005.
J. Antich, A. Ortiz, M. Carreras, P. Ridao. Testing the Control Architecture of a Visually Guided Underwater Cable Tracker by using a UUV Prototype. In IFAC Symposium on Intelligent Autonomous Vehicles (IAV), Lisbon (Portugal), 2004.
J. Antich, A. Ortiz. An Underwater Simulation Environment for Testing Autonomous Robot Control Architectures. In IFAC Conference on Control Applications in Marine Systems (CAMS), Ancona (Italy), 2004.
J. Antich, A. Ortiz. Evolutionary Tuning of the Control Architecture of an Underwater Cable Tracker. In Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 100 - IOS Press), Palma de Mallorca (Spain), 2003.
J. Antich, A. Ortiz. A Behaviour-based Control Architecture for Visually Guiding an Underwater Cable Tracker. In First IFAC Workshop on Guidance and Control of Underwater Vehicles (GCUV), Newport, South Wales (UK), 2003.
J. Antich, A. Ortiz. Experimental Evaluation of the Control Architecture of an Underwater Cable Tracker. In IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC), Girona (Spain), 2003.
J. Antich, A. Ortiz. Underwater Cable Tracking by Visual Feedback. In First Iberian Conference on Pattern Recognition and Image Analysis (IbPRIA, LNCS 2652), Port d'Andratx (Spain), 2003.
J. Antich, A. Ortiz. A Goal-directed Reactive Obstacle Avoidance Strategy with Global Proofs. In IFAC Symposium on Intelligent Autonomous Vehicles (IAV), Toulouse (France), 2007.
A. El-Fakdi, M. Carreras, J. Antich, A. Ortiz. Learning by Example: Reinforcement Learning Techniques for Real Autonomous Underwater Cable Tracking. In IEEE/IFAC International Conference on Informatics in Control, Automation and Robotics (ICINCO), Funchal, Madeira (Portugal), 2008.
J. Antich, A. Ortiz. A Convergent Dynamic Window Approach with Minimal Computational Requeriments. In International Conference on Intelligent Autonomous Systems (IAS), Baden Baden (Germany), 2008.
J. Antich, A. Ortiz. A Rapid Anytime Path Planner with Incorporated Range Sensing to Improve Control on Solution Quality. In International Conference on Intelligent Autonomous Systems (IAS), Ottawa (Canada), 2010.
J. Antich, A. Ortiz, J. Mínguez. ABUG: A Fast Bug-derivative Anytime Path Planner with Provable Suboptimality Bounds. In IEEE International Conference on Advanced Robotics (ICAR), Munich (Germany), 2009.
J. Antich, A. Ortiz, J. Mínguez. A Bug-Inspired Algorithm for Efficient Anytime Path Planning. In IEEE International Conference on Intelligent Robots and Systems (IROS), St. Louis (USA), 2009 .
.
A. Ortiz, J. Antich, G. Oliver. Experimental Evaluation of a Particle Filter-based Approach for Visually Tracking Undersea Cables. In IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC), Guarujà (Brazil), 2009.
A. Ortiz, J. Antich, G. Oliver. A Bayesian Approach for Tracking Undersea Narrow Telecommunication Cables. In MTS/IEEE Oceans, Bremen (Germany), 2009.
J. Antich, A. Ortiz. Traversabillity and tenacity: Two new concepts improving the navigation capabilities of reactive control systems. In Robotics and Automation in the Maritime Industries, pp. 133--154, 2006.
J. Antich, A. Ortiz, G. Oliver. Reactive control of a visually guided underwater cable tracker. In Robotics and Automation in the Maritime Industries, pp. 111—132, 2006.
J. Antich, A. Ortiz, G. Oliver. A PFM-based Control Architecture for a Visually Guided Underwater Cable Tracker to Achieve Navigation in Troublesome Scenarios. In Journal of Maritime Research, vol. 2, no. 1, pp. 33--50, 2005  .
.
J. Antich, A. Ortiz. Development of the Control Architecture of a Vision-guided Underwater Cable Tracker. In International Journal of Intelligent Systems, vol. 20, no. 5, pp. 477--498, 2005.
G. Oliver, J. Antich, A. Ortiz. Pipe and cable inspection in the AIRSUB project context. In Instrumentation Viewpoint, vol. , no. 4, pp. 28--29, 2005.
A. Ortiz, J. Antich. Bayesian Visual Tracking for Inspection of Undersea Power and Telecommunication Cables. In Journal of Maritime Research (JMR), vol. 6, no. 2, pp. 83--98, 2009.
J. Antich, A. Ortiz. Behaviour-based Control of an Underwater Cable Tracker. In Technical Report A-04-2003, Dep. Mathematics and Computer Science (UIB), 2003.
J. Antich. Reactive Robotics: A Paradigm Not Limited to Simple Tasks. 2006.
J. Antich, A. Ortiz. A Dynamic Window Approach to Navigate in Complex Scenarios using Low-Cost Sensors for Obstacle Detection. In Technical Report A-04-2007, Dep. Mathematics and Computer Science (UIB), 2007.
J. Antich, A. Ortiz. Reactive Navigation in Troublesome Environments: T2 Strategies. In Instrumentation Viewpoint, vol. , no. 6, pp. 51--52, 2007.
J. Antich, A. Ortiz. Bug-based T2: A New Globally Convergent Potential Field Approach to Obstacle Avoidance. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing (China), 2006.
J. Antich, A. Ortiz, G. Oliver. A Control Strategy for Fast Obstacle Avoidance in Troublesome Scenarios: Application in Underwater Cable Tracking. In IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC), Lisbon (Portugal), 2006.
J. Antich, A. Ortiz. Extending the Potential Fields Approach to Avoid Trapping Situations. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Edmonton (Canada), 2005.
J. Antich, A. Ortiz. Bug-based T2: A New Globally Convergent Approach to Reactive Navigation. In Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 131 - IOS Press), Alguero (Sardinia, Italy), 2005.
J. Antich, A. Ortiz, M. Carreras, P. Ridao. Testing the Control Architecture of a Visually Guided Underwater Cable Tracker by using a UUV Prototype. In IFAC Symposium on Intelligent Autonomous Vehicles (IAV), Lisbon (Portugal), 2004.
J. Antich, A. Ortiz. An Underwater Simulation Environment for Testing Autonomous Robot Control Architectures. In IFAC Conference on Control Applications in Marine Systems (CAMS), Ancona (Italy), 2004.
J. Antich, A. Ortiz. Evolutionary Tuning of the Control Architecture of an Underwater Cable Tracker. In Catalan Conference on Artificial Intelligence (CCIA, Artificial Intelligence Research and Development, vol. 100 - IOS Press), Palma de Mallorca (Spain), 2003.
J. Antich, A. Ortiz. A Behaviour-based Control Architecture for Visually Guiding an Underwater Cable Tracker. In First IFAC Workshop on Guidance and Control of Underwater Vehicles (GCUV), Newport, South Wales (UK), 2003.
J. Antich, A. Ortiz. Experimental Evaluation of the Control Architecture of an Underwater Cable Tracker. In IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC), Girona (Spain), 2003.
J. Antich, A. Ortiz. Underwater Cable Tracking by Visual Feedback. In First Iberian Conference on Pattern Recognition and Image Analysis (IbPRIA, LNCS 2652), Port d'Andratx (Spain), 2003.
J. Antich, A. Ortiz. A Goal-directed Reactive Obstacle Avoidance Strategy with Global Proofs. In IFAC Symposium on Intelligent Autonomous Vehicles (IAV), Toulouse (France), 2007.
A. El-Fakdi, M. Carreras, J. Antich, A. Ortiz. Learning by Example: Reinforcement Learning Techniques for Real Autonomous Underwater Cable Tracking. In IEEE/IFAC International Conference on Informatics in Control, Automation and Robotics (ICINCO), Funchal, Madeira (Portugal), 2008.
J. Antich, A. Ortiz. A Convergent Dynamic Window Approach with Minimal Computational Requeriments. In International Conference on Intelligent Autonomous Systems (IAS), Baden Baden (Germany), 2008.
J. Antich, A. Ortiz. A Rapid Anytime Path Planner with Incorporated Range Sensing to Improve Control on Solution Quality. In International Conference on Intelligent Autonomous Systems (IAS), Ottawa (Canada), 2010.
J. Antich, A. Ortiz, J. Mínguez. ABUG: A Fast Bug-derivative Anytime Path Planner with Provable Suboptimality Bounds. In IEEE International Conference on Advanced Robotics (ICAR), Munich (Germany), 2009.
J. Antich, A. Ortiz, J. Mínguez. A Bug-Inspired Algorithm for Efficient Anytime Path Planning. In IEEE International Conference on Intelligent Robots and Systems (IROS), St. Louis (USA), 2009
.A. Ortiz, J. Antich, G. Oliver. Experimental Evaluation of a Particle Filter-based Approach for Visually Tracking Undersea Cables. In IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC), Guarujà (Brazil), 2009.
A. Ortiz, J. Antich, G. Oliver. A Bayesian Approach for Tracking Undersea Narrow Telecommunication Cables. In MTS/IEEE Oceans, Bremen (Germany), 2009.
J. Antich, A. Ortiz. Traversabillity and tenacity: Two new concepts improving the navigation capabilities of reactive control systems. In Robotics and Automation in the Maritime Industries, pp. 133--154, 2006
.J. Antich, A. Ortiz, G. Oliver. Reactive control of a visually guided underwater cable tracker. In Robotics and Automation in the Maritime Industries, pp. 111—132, 2006.
J. Antich, A. Ortiz, G. Oliver. A PFM-based Control Architecture for a Visually Guided Underwater Cable Tracker to Achieve Navigation in Troublesome Scenarios. In Journal of Maritime Research, vol. 2, no. 1, pp. 33--50, 2005
.J. Antich, A. Ortiz. Development of the Control Architecture of a Vision-guided Underwater Cable Tracker. In International Journal of Intelligent Systems, vol. 20, no. 5, pp. 477--498, 2005.
G. Oliver, J. Antich, A. Ortiz. Pipe and cable inspection in the AIRSUB project context. In Instrumentation Viewpoint, vol. , no. 4, pp. 28--29, 2005.
A. Ortiz, J. Antich. Bayesian Visual Tracking for Inspection of Undersea Power and Telecommunication Cables. In Journal of Maritime Research (JMR), vol. 6, no. 2, pp. 83--98, 2009.